// physical a.i. & model training
Custom Neural Training for Autonomous Hardware
We don't just run models; we build them from the ground up. We help you design the
data strategy, curate specific datasets for your sensors,
and train custom architectures optimized for the silicon's constraints.
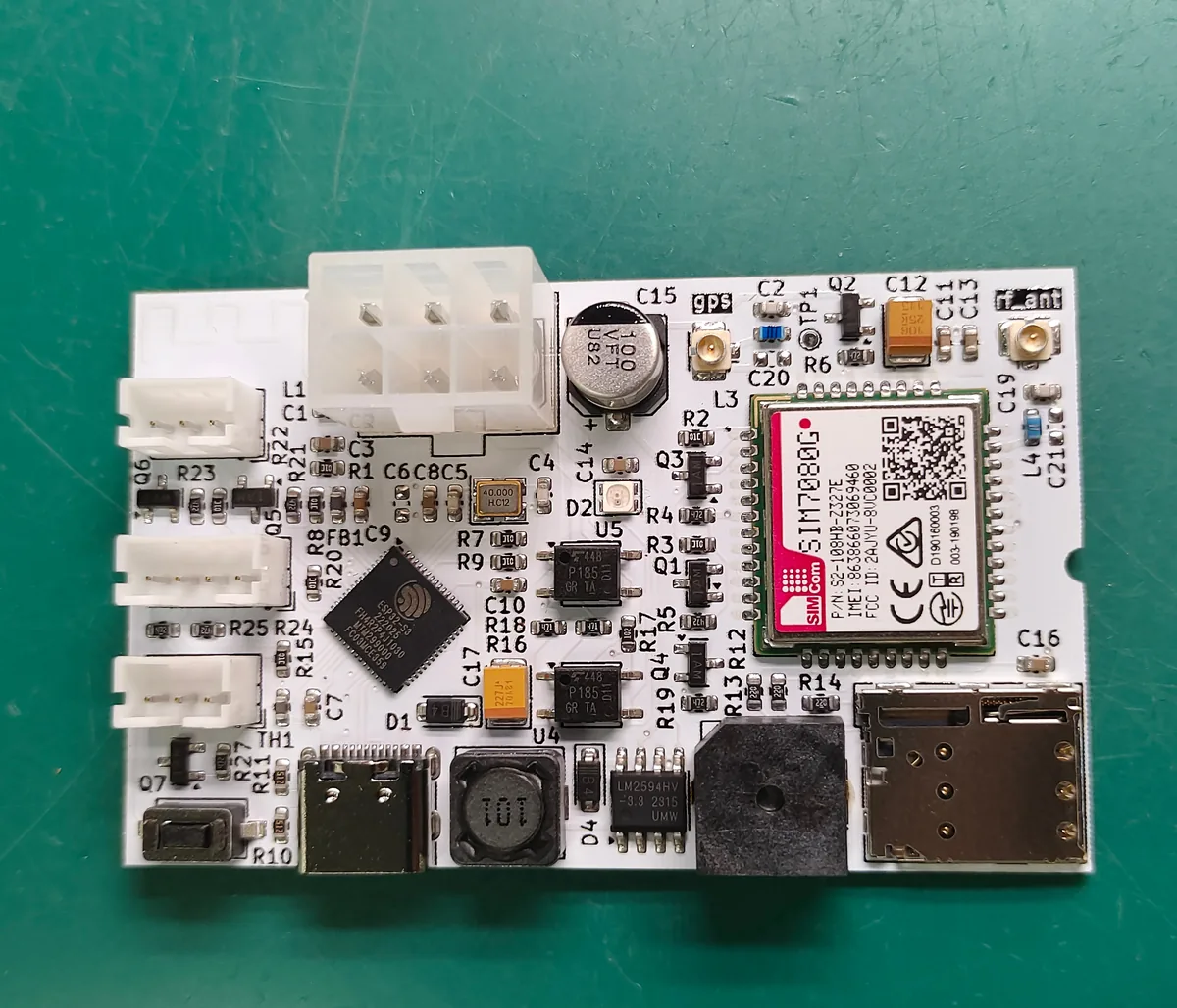
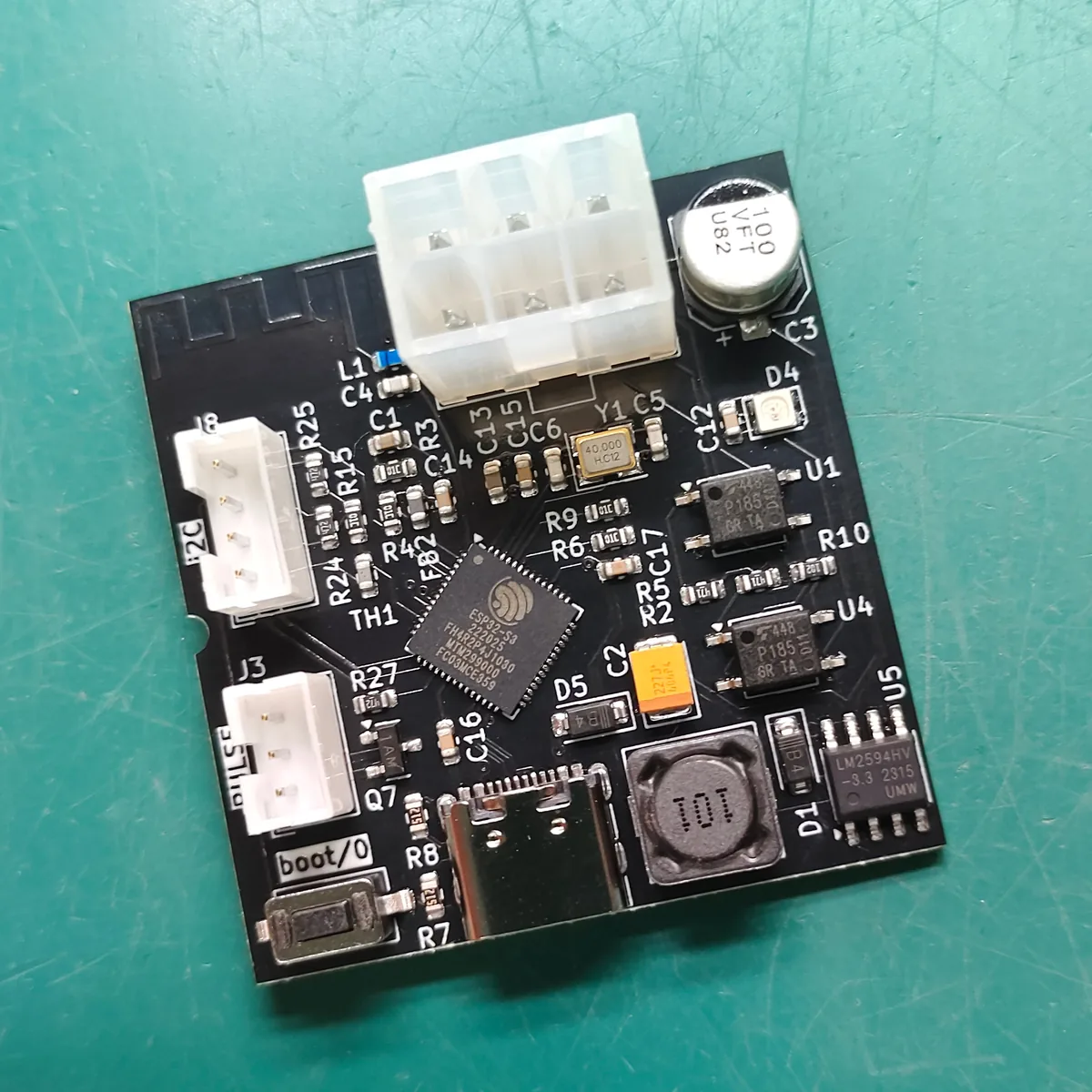
Inference happens on the ESP32-S3 itself — real intelligence, zero cloud latency, zero per-call cost.
01 · data
Data Curation
We design the collection strategy for your sensors — because edge AI is only as good as the dataset.
02 · train
Custom Training
PyTorch/Keras models trained specifically for MCU constraints, optimized for accuracy and low flash footprint.
03 · quantize
esp-ppq · int8
Weights compressed to int8 with Espressif's PPQ fork — sized for kilobytes of RAM, not gigabytes.
04 · deploy
ESP-DL Runtime
The model runs on the silicon's vector instructions — same chip that reads the sensors, zero latency.
Sensors in, decisions out
Example from our lab: a network that reads temperature, humidity and light, and decides —
on the chip — whether to switch the fan, the pump or the lights. The rules are learned
from data. Swap the sensors and the dataset, and the same pipeline fits your product —
including vision (person and object detection with the ESP32-S3 camera, via ESP-DL)
and audio (keyword spotting).
vision
keyword spotting
predictive maintenance
anomaly detection
classification
python train_export.py
training sensor_model... done
export → sensor_model.onnx
esp-ppq int8 → sensor_model.espdl (target: esp32s3)
idf.py flash monitor
I (1234) minibrain: T=37.2C U=55% L=640lux -> CMD_FAN_ON
I (3234) minibrain: T=22.1C U=18% L=400lux -> CMD_PUMP_ON
~ #